金枪鱼是一类以优越游动能力著称的大型海洋鱼类,可以进行快速巡航游动、高速爆发游动以及长距离迁徙。金枪鱼进化了多种适应性特征与特化结构,例如:流线型的身体、新月形的鳍、尾部龙骨结构(Caudal keels)以及小鳍(Finlet)等(图1),并且被认为往往具有提升游动性能的作用。其中,小鳍是两列分别位于身体上下中线的可独立活动的三角状小型鱼鳍。
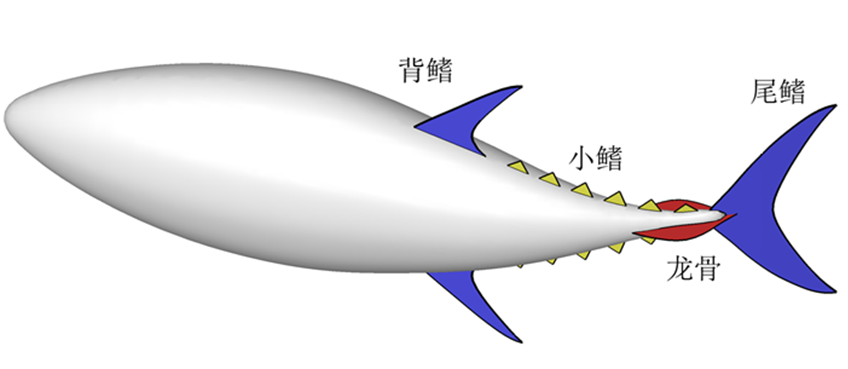
图1 金枪鱼外形示意图:蓝色为背鳍与尾鳍,红色为尾部龙骨,黄色为小鳍
尽管小鳍吸引了来自不同领域的研究,但这一结构对金枪鱼游动的影响及其背后的作用机制仍未形成定论。前人研究中不同的小鳍模型可能导致不同的结论,因此建立合理的小鳍模型是探究小鳍运动机制的基础。为此,在清华大学湍流实验室研究团队之前的研究中,根据实验测量数据拟合得到了适用于数值模拟的对称化小鳍运动模型,如图2所示(Zhang & Huang, 2022, TAML)。
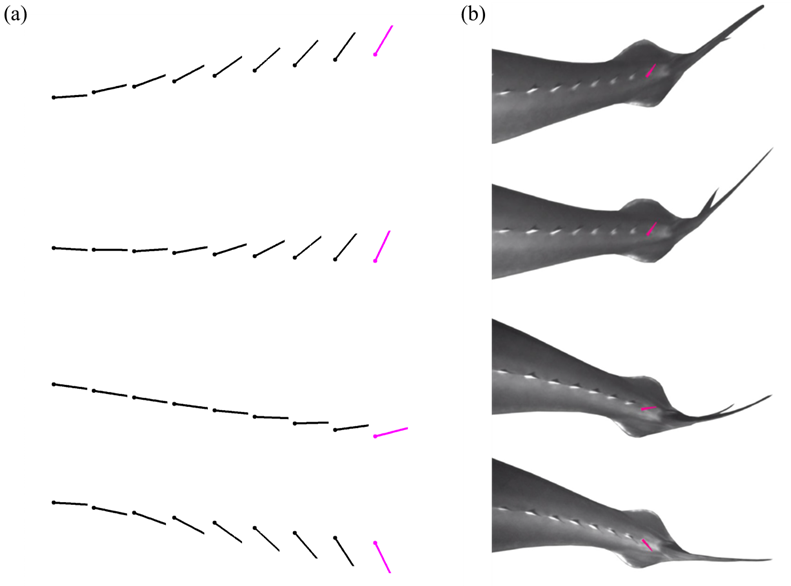
图2 (a)小鳍运动模型与(b)活体观测的对比 (Zhang & Huang, 2022, TAML)
另一方面,对活体金枪鱼以及鲭鱼游动的观察均发现了小鳍偏转运动被动与主动控制的证据,但确切的偏转机制仍未形成定论。为此,清华大学湍流实验室研究团队针对金枪鱼小鳍建立了偏转运动的被动与主动控制模型(图3),并与基于实验数据拟合得到的给定运动模型进行了对比。
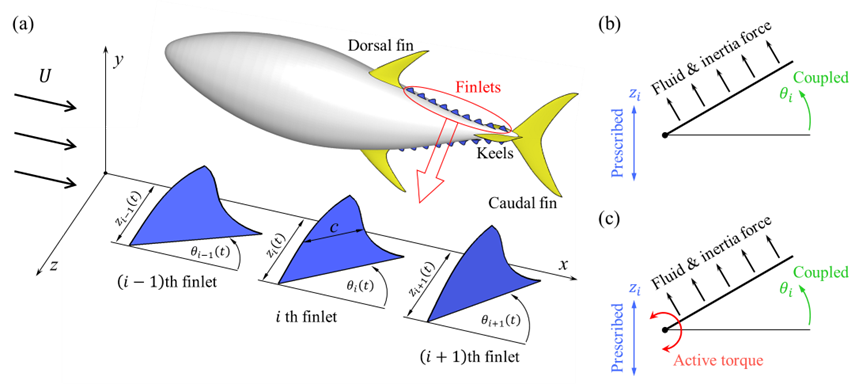
图3 金枪鱼小鳍偏转模型
在被动模型中,小鳍的偏转运动与实验拟合结果定性上一致,但偏转幅值随小鳍变化趋势表现出显著差异。对比被动模型与给定模型(图4),发现被动模型中流体力矩阻碍小鳍进一步偏转,而给定运动模型中小鳍在流体力矩阻碍下仍会进一步偏转,表明金枪鱼对小鳍存在主动控制。
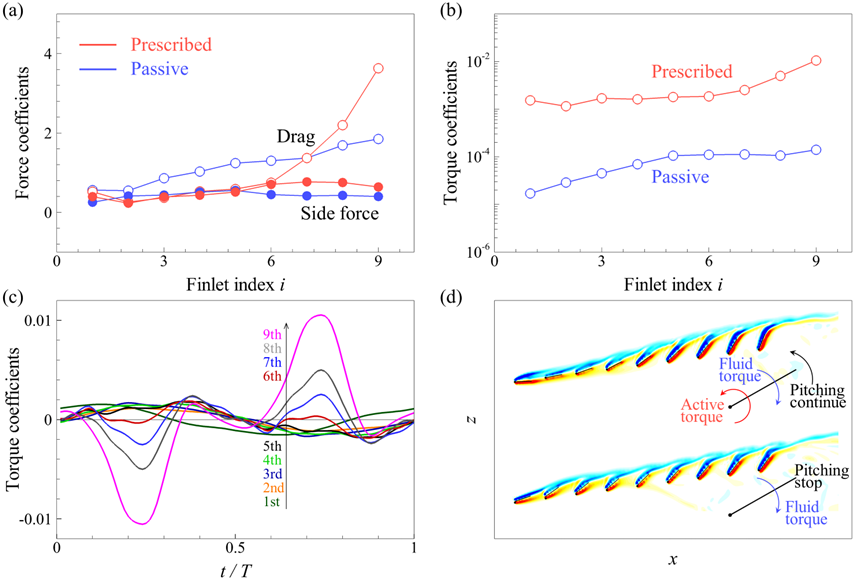
图4 金枪鱼小鳍被动偏转模型与给定运动模型的对比
因此,在小鳍根部施加主动控制力矩以模拟金枪鱼对小鳍偏转运动的主动控制,并由本文数值模拟结果与实验测量偏转运动数据拟合得到了控制方程。对当前主动控制模型进行流固耦合模拟,所得小鳍偏转运动规律与实验数据拟合结果符合较好(图5),实现了与观测结果接近的小鳍偏转运动。
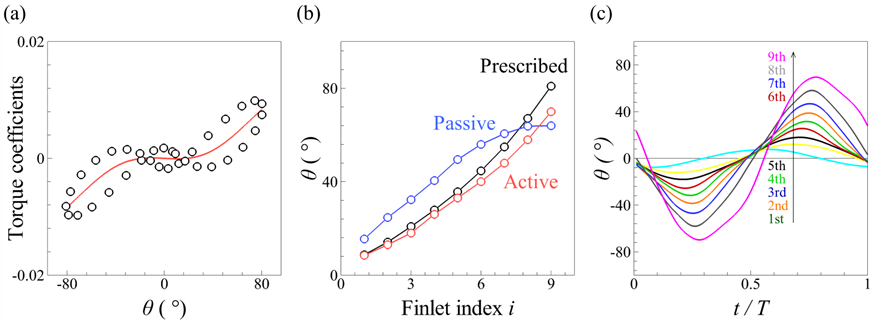
图5 金枪鱼小鳍主动控制模型的模拟结果
相关成果以An active torque model for regulating tuna finlets为题于近期发表在Physics of Fluids上,并被期刊选为Featured Article及Scilight专栏报道(Scilight评论文章:Finlet dynamics in tuna give insights into control mechanisms for enhanced propulsion, https://doi.org/10.1063/10.0034538)。博士后张钧铎为论文第一作者,黄伟希教授为论文通讯作者,博士后韩鹏、许春晓教授和KAIST成亨镇教授为论文的共同作者。该项目得到了国家自然科学基金的资助。
论文信息:Zhang J D, Han P, Xu C X, Sung H J, Huang W X. An active torque model for regulating tuna finlets. Physics of Fluids, 37: 011703, 2025.
原文链接:https://doi.org/10.1063/5.0231384